maxon DC motors drive robotic snake-arms into tight spaces.
A robot that is as agile as a snake can explore almost any hidden nook and cranny. Problems can often occur moving in confined and hazardous spaces, and whilst these spaces are difficult for humans to work within, a snake-arm robot has no issue. Whether for aircraft assembly, nuclear power stations or the inspection of pipes and sewage systems: maxon DC motors are responsible for the high-precision movements of the multiple degree-of-freedom robotic snake-arm.
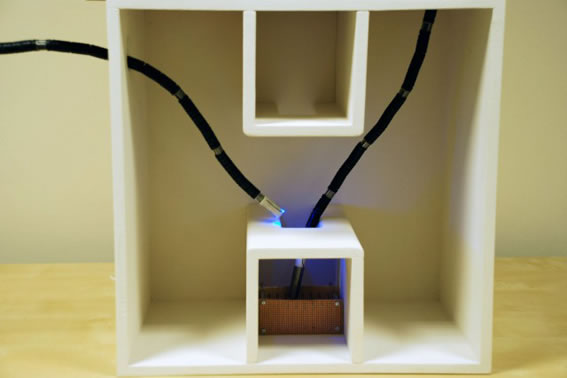
Just like in a science fiction film, the robotic snake-arm wriggles through a small hole. Its task is to conduct a safety inspection in a hard to reach location, recording video as it goes. Confined and hazardous spaces are common in many industrial applications. These confines are not only difficult for humans to access, but these areas and the devices they contain may also have to be regularly inspected. OC Robotics, based in Bristol, looked at the world of animals for inspiration and developed the snake arm robot. Managing director Rob Buckingham and technical director Andrew Graham produced the first prototypes in 2001. They have continued to this day to perfect the technology behind the snake arm robot. Snake arm robots have a slim, flexible design - they can easily fit through small gaps and circumnavigate obstacles with great skill.
Each arm is customised specifically for the particular application that it will be used for. For Example; the “head” of the robot can be fitted with a wide range of tools. OC Robotics offers tools for visual inspection including lighting and cameras; special gripper jaws or lasers for cutting metal and concrete (see video). Depending on the application, the snake-arm robot can be mounted on a stationary or mobile station such as an industrial robot or a gantry.
Always following its nose.
The snake-arm is capable of performing a whole range of inspection and maintenance tasks, without any direct support from its environment. It can be navigated freely across open spaces. The robot is controlled by means of proprietary software which enables the operator to control the snake-arm by means of the “nose-following” principle. A command is transmitted to the tip of the snake-arm by means of a joystick and the rest of the joints follow this specified path. In other words, if the operator steers the tip clear of an obstacle, the rest of the snake-arm will follow suit. With this technology, it becomes a lot easier for people to work in hazardous environments, yet humans are not eliminated completely, explains Rob Buckingham.
Brushless maxon DC motors for flexible movements.
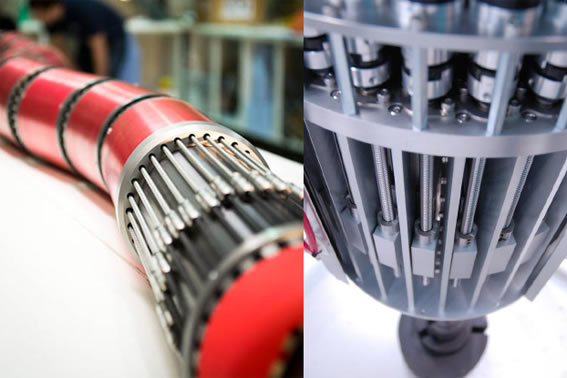
In a human arm, the tendons connect the muscles to the bones of the joints. Similarly, in the snake-arm robot, stainless-steel wires are connected to the individual joints of the robot like tendons. Each individual wire inside the snake-arm is connected to a maxon. The snake-like wriggling movements are the result of the motors transmitting the mechanical power to the snake arm, where the individual joints of the arm are located. Depending on the version, up to 50 maxon DC motors are installed in each snake-arm. These are not located directly in the arm, but instead in an actuator pack in the base of the robot. This is advantageous as the electronics are more easily accessible and not exposed to the confined and hazardous environments. Another area of use for the motors is the different tools for the snake-arm's head. Here, one or two maxons are responsible for the movements of (for example) the gripper jaws or swage tool.
The biggest challenge to the drives is that they have to provide a high enough power output inside a compact design. Therefore, the brushless DC motor, maxon EC-max 30mm 60 W and the ceramic version of the32mm planetary gearhead GP32 are used for this highly complex application. Thanks to the brushless design, the electronically commutated DC motors are excellently prepared for long duty cycles. The heart of the maxons is the ironless winding – with the benefits inherent to the physical design, such as zero cogging torque, high efficiency and excellent control dynamics.
Special modifications were necessary for the DC motors used in the snake-arm robot. A special cable and fastening holes were required, whilst the maxon planetary gearhead was modified for the application and a special housing was developed for the brake. For OC Robotics, the reliable motors, high levels of customer support, high quality and high power density were the decisive criteria for selecting maxon.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}